پروژه ها و تحقیقات دانشجویی
فروشگاه دانلود پروژه ها ،مقاله و تحقیقات دانشجویی - project , computer , book , pdf , word, پروژه , تحقیق , مقاله , کارآموزی , پایان نامه , عمران , کامپیوتر , ساختمان , الکترونیکپروژه ها و تحقیقات دانشجویی
فروشگاه دانلود پروژه ها ،مقاله و تحقیقات دانشجویی - project , computer , book , pdf , word, پروژه , تحقیق , مقاله , کارآموزی , پایان نامه , عمران , کامپیوتر , ساختمان , الکترونیکدرباره من

پیوندها
- دانلود پروژه ها ،مقاله و تحقیقات دانشجویی دانلود پروژه ها ،مقاله و تحقیقات دانشجویی
- فروشگاه پروژه ها و تحقیقات دانشجویی فروشگاه پروژه ها و تحقیقات دانشجویی
- بهترین و جدید ترین پروژه - تحقیق - پایان نامه بهترین و جدید ترین پروژه - تحقیق - پایان نامه
- فروشگاه فایل آفمس خرید و فروش پروژه های دانشجویی
دستهها
- کامپیوتر 605
- جغرافیا 271
- برق ، الکترونیک و مخابرات 214
- روانشناسی و علوم تربیتی 361
- مدیریت 296
- حسابداری 139
- معماری 118
- آمار 34
- عمران 138
- ساختمان 38
- مهندسی پزشکی 7
- دامپزشکی 2
- شیمی 58
- مکانیک 116
- محیط زیست 36
- نساجی 14
- حقوق 77
- گردشگری و توریسم 15
- علوم اجتماعی 19
- هنر و گرافیک 20
- اقتصاد 78
- تاریخ و ادبیات 34
- زبان های خارجی 16
- دام و طیور 18
- علوم سیاسی 8
- معارف اسلامی 70
- باستان شناسی 5
- زیست شناسی 15
- صنایع غذایی 70
- کشاورزی و زراعت 69
- صنایع 44
- پزشکی 44
- پلیمر 9
- نفت و پتروشیمی 10
- فیزیک 23
- صنایع معدنی 24
- صنعتی 40
- متفرقه 208
- علوم نظامی 3
- تربیت بدنی 32
- شهر سازی-برنامه ریزی شهری 52
- زمین شناسی 11
- ریاضی 12
- مواد و متالوژی 21
- طب سنتی 3
- آزمون استخدامی 1
- روانپزشکی 1
- رمان 2
- خدماتی و آموزشی 32
- گزارش کارآموزی 32
ابر برجسب
تحقیق گزارش کارآموزی طرح توجیهی پرسشنامه بررسی مدیریت هزینه های جاری طرح برنامه مبانی نظری نقشه مدل رقومی ارتفاعی (DEM) سرمایه گذاری ثابت طرح کامپیوتر و IT جدول هزینه های جاری طرح پروژه آمار نقشه اتوکد حسابداری خلاصه طرح جدول هزینه های ثابت واقع در استان فارس سرمایه در گردش لیست شرکتهای پخش مواد غذایی پروژه کارآفرینی واقع در استان اصفهان جدول سرمایه گذاری بحث و نتیجه گیری نرم افزار سورس برنامه دانلود پروژه طرح کارآفرینی محاسبات ابری آموزش روانشناسی و علوم تربیتی کد متلب رایگان جدول هزینه های ثابت و متغیر طرح دانلود تحقیق کسب و کار خانگی معماری پروپوزال DEM نقشه مدل رقومی ارتفاعی نتیجه گیری c++ مکانیک تفسیر و نمره گذاری آزمون نمونه واقعی اجرا استان گیلان شیپ فایل نقطه ای نتایج حاصله از اجرای طرح دلایل انتخاب طرح دانلود مقاله محاسبات اقتصادی طرح توجیه اقتصادی طرح کارآفرینی بررسی رابطه بین پروژه پایان نامه مقاله دانلود پاورپوینتجدیدترین یادداشتها
همه- جذب پول و ثروت با فایل صوتی خود هیپنوتیزم تغییر باورهای منفی
- دانلود پاورپوینت آفریدگار زیبایی درس 1 فارسی پایه چهارم دبستان
- آموزش نصب برنامه WCAP را بر روی سیستم عامل لینوکس اوبونتو Linux Ubuntu 20.04
- کنسول چوبی با تزیینات
- پاورپوینت طراحی ساعت دیجیتال با 7 سگمنت
- پاورپوینت زندگینامه امام رضا (ع)
- پاورپوینت مهارت فرزند پروری
- پاورپوینت بررسی بیش فعالی
- پاورپوینت بررسی مثلث برمودا
- پاورپوینت بررسی کشف حجاب
بایگانی
- اردیبهشت 1400 158
- خرداد 1396 1
- اردیبهشت 1396 9
- فروردین 1396 19
- اسفند 1395 13
- بهمن 1395 27
- دی 1395 42
- آذر 1395 27
- آبان 1395 40
- مهر 1395 48
- شهریور 1395 96
- مرداد 1395 37
- تیر 1395 116
- خرداد 1395 11
- اردیبهشت 1395 25
- فروردین 1395 121
- اسفند 1394 52
- بهمن 1394 14
- دی 1394 138
- آذر 1394 360
- آبان 1394 298
- مهر 1394 721
- شهریور 1394 1169
جستجو
تحقیق بررسی ساختار و عملکرد موتورهای پلهای
تحقیق بررسی ساختار و عملکرد موتورهای پلهای
فرمت فایل دانلودی: .docفرمت فایل اصلی: doc
تعداد صفحات: 54
حجم فایل: 702
قیمت: : 4000 تومان
بخشی از متن:
بخشی از متن:
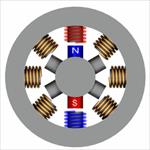
شکل 1-1 مقطع عرضی ساختار یک موتور پلهای مدرن نمونه را نشان می دهد؛ این موتور به نام موتور رلوکتانس متغییر تک پشته ای خوانده می شود. ما ابتدا با استفاده از این شکل نحوه عملکرد این ماشین را مطالعه خواهیم کرد. هسته استاتور دارای شش قطب یا دندانه برجسته می باشد، روتور هم دارای چهار قطب است، هر دو هسته روتور و استاتور از جنس فولاد نرم هستند. سه دسته سیم پیچی همانطور که در شکل نشان داده شده، آرایش داده شده اند. هر دسته دارای دو کلاف است که بصورت سری متصل شده اند. یک دسته از سیم پیچی ها فاز نامیده می شود، و نتیجتاً این ماشین یک موتور سه فاز است. جریان از یک منبع تغذیه DC از طریق کلیدهای I، II، III به سیم پیچی ها تامین می شود. در وضعیت (1)، سیم پیچی فاز I از طریق جریان کلید I تغذیه می شود، یا به اصطلاح فنی فاز I تحریک می شود؛ شار مغناطیسی ناشی از تحریک که در فاصله هوایی واقع می شود با پیکانهایی نشان داده شده است. در وضعیت (1)، دو قطب برجسته استاتور فاز I که تحریک شده اند با دو دندانه از چهار دندانه روتور هم ردیف هستند. این حالت از نظر دینامیکی یک حالت تعادل است. هنگامیکه کلید II برای تحریک فاز II علاوه بر فاز I بسته می شود، شار مغناطیسی در قطبهای استاتور فاز II به حالت نشان داده شده در وضعیت (2) بوجود می آید، و گشتاوری در جهت عکس ساعتگرد بعلت “کشش” در خطوط خمیده میدان مغناطیسی بوجود می آید. از اینرو روتور سرانجام به وضعیت (3) خواهد رسید.
فهرست مطالب:
1-3- موتور پلهای چیست و مشخصه های اساسی آن کدامند؟
2-3- تاریخچه ابتدایی موتورهای پلهای
3-3- فعالیتهای دانشگاهی
4- طرح کلی موتورهای پلهای مدرن
1-4- سیستم های کنترل حلقه- باز
1-1-4- ترکیب سیستم
2-1-4- پله و نمو
2-4- ویژگیهای موتورهای پلهای از نقطه نظر کاربرد
1-2-4- زاویه پله کوچک و چگونگی دستیابی به آن
2-2-4- گشتاور بازیابی و نگهدارنده بالا
3-2-4- خطای تعیین موقعیت جمع ناپذیر
4-2-4- رفتار دینامیک بسیار خوب ناشی از نسبتهای گشتاور به اینرسی بالا
3-4- طبقه بندی موتورهای پلهای
4-4- روش های تحریک
1-4-4- تحریک تکفاز
2-4-4- عملکرد تحریک دو فاز
3-4-4- روش نیم پله
5- سیستم درایو و مدار کنترل حلقه- باز موتورهای پلهای
1-5- سیستم درایو
1-2-5- توالی ساز یوینورسال MSI
6- کاربرد موتورهای پلهای
1-6- لوازم جانبی کامپیوتر
1-1-6- چاپگرها
2-1-6- رسامهای گراف
3-1-6- تمایلات جدید به موتورهای پلهای خطی/ سطحی
4-1-6- درایوهای دیسک سخت/ فلاپی
7- ساخت موتورهای پلهای
1-7- اساس طراحی و ساخت
1-1-7- فلسفه طراحی کارخانه
2-1-7- تولید انبوه و تولید گروهی
2-7- طراحی
1-2-7- تعیین مشخصات نهایی
3-2-7- اهمیت دقت تعیین موقعیت
صفحه کلید

تحقیق بررسی ساختار و عملکرد موتورهای پلهای
تحقیق بررسی ساختار و عملکرد موتورهای پلهای
فرمت فایل دانلودی: .docفرمت فایل اصلی: doc
تعداد صفحات: 54
حجم فایل: 702
قیمت: : 4000 تومان
بخشی از متن:
بخشی از متن:
شکل 1-1 مقطع عرضی ساختار یک موتور پلهای مدرن نمونه را نشان می دهد؛ این موتور به نام موتور رلوکتانس متغییر تک پشته ای خوانده می شود. ما ابتدا با استفاده از این شکل نحوه عملکرد این ماشین را مطالعه خواهیم کرد. هسته استاتور دارای شش قطب یا دندانه برجسته می باشد، روتور هم دارای چهار قطب است، هر دو هسته روتور و استاتور از جنس فولاد نرم هستند. سه دسته سیم پیچی همانطور که در شکل نشان داده شده، آرایش داده شده اند. هر دسته دارای دو کلاف است که بصورت سری متصل شده اند. یک دسته از سیم پیچی ها فاز نامیده می شود، و نتیجتاً این ماشین یک موتور سه فاز است. جریان از یک منبع تغذیه DC از طریق کلیدهای I، II، III به سیم پیچی ها تامین می شود. در وضعیت (1)، سیم پیچی فاز I از طریق جریان کلید I تغذیه می شود، یا به اصطلاح فنی فاز I تحریک می شود؛ شار مغناطیسی ناشی از تحریک که در فاصله هوایی واقع می شود با پیکانهایی نشان داده شده است. در وضعیت (1)، دو قطب برجسته استاتور فاز I که تحریک شده اند با دو دندانه از چهار دندانه روتور هم ردیف هستند. این حالت از نظر دینامیکی یک حالت تعادل است. هنگامیکه کلید II برای تحریک فاز II علاوه بر فاز I بسته می شود، شار مغناطیسی در قطبهای استاتور فاز II به حالت نشان داده شده در وضعیت (2) بوجود می آید، و گشتاوری در جهت عکس ساعتگرد بعلت “کشش” در خطوط خمیده میدان مغناطیسی بوجود می آید. از اینرو روتور سرانجام به وضعیت (3) خواهد رسید.
فهرست مطالب:
1-3- موتور پلهای چیست و مشخصه های اساسی آن کدامند؟
2-3- تاریخچه ابتدایی موتورهای پلهای
3-3- فعالیتهای دانشگاهی
4- طرح کلی موتورهای پلهای مدرن
1-4- سیستم های کنترل حلقه- باز
1-1-4- ترکیب سیستم
2-1-4- پله و نمو
2-4- ویژگیهای موتورهای پلهای از نقطه نظر کاربرد
1-2-4- زاویه پله کوچک و چگونگی دستیابی به آن
2-2-4- گشتاور بازیابی و نگهدارنده بالا
3-2-4- خطای تعیین موقعیت جمع ناپذیر
4-2-4- رفتار دینامیک بسیار خوب ناشی از نسبتهای گشتاور به اینرسی بالا
3-4- طبقه بندی موتورهای پلهای
4-4- روش های تحریک
1-4-4- تحریک تکفاز
2-4-4- عملکرد تحریک دو فاز
3-4-4- روش نیم پله
5- سیستم درایو و مدار کنترل حلقه- باز موتورهای پلهای
1-5- سیستم درایو
1-2-5- توالی ساز یوینورسال MSI
6- کاربرد موتورهای پلهای
1-6- لوازم جانبی کامپیوتر
1-1-6- چاپگرها
2-1-6- رسامهای گراف
3-1-6- تمایلات جدید به موتورهای پلهای خطی/ سطحی
4-1-6- درایوهای دیسک سخت/ فلاپی
7- ساخت موتورهای پلهای
1-7- اساس طراحی و ساخت
1-1-7- فلسفه طراحی کارخانه
2-1-7- تولید انبوه و تولید گروهی
2-7- طراحی
1-2-7- تعیین مشخصات نهایی
3-2-7- اهمیت دقت تعیین موقعیت
صفحه کلید