پروژه ها و تحقیقات دانشجویی
فروشگاه دانلود پروژه ها ،مقاله و تحقیقات دانشجویی - project , computer , book , pdf , word, پروژه , تحقیق , مقاله , کارآموزی , پایان نامه , عمران , کامپیوتر , ساختمان , الکترونیکپروژه ها و تحقیقات دانشجویی
فروشگاه دانلود پروژه ها ،مقاله و تحقیقات دانشجویی - project , computer , book , pdf , word, پروژه , تحقیق , مقاله , کارآموزی , پایان نامه , عمران , کامپیوتر , ساختمان , الکترونیک
پروژه طراحی روبات آتش نشان

پروژه طراحی روبات آتش نشان
فرمت فایل دانلودی: .rarفرمت فایل اصلی: docx
تعداد صفحات: 52
حجم فایل: 2087
قیمت: : 12000 تومان
بخشی از متن:
مقدمه:
از دیرباز آرزوی بسیاری از انسانها ساخت ابزاری بود که انجام کارها را برای آنها آسان کند. همین دغدغه باعث ساخت وسایلی مانند چرخ شد. پس از اختراع ماشین بخار و دوره صنعتی شذن جوامع، پیشگامان صنعت کم کم به این نتیجه رسیدند که نیاز است تا مکانیسمها و ماشینهایی اختراع شوند که بتوانند کارها را به صورت خودکار و بدون حضور انسان انجام دهند و همین امر موجب پیدایش روباتهای اولیهای مانند بازوهای روباتیک شد. از آنجا که روباتیک بخشهای مختلفی شامل مکانیک، الکترونیک، کنترل و ... را شامل میگردد، امروزه به عنوان یکی از معیارهای پیشرفته بودن یک کشور در نظر گرفته میشود، به همین دلیل یادگیری و استفاده از روباتها یک مسئله مهم است که امروزه بسیار مورد توجه است. روبات آتشنشان، روباتی است که توانایی یافتن و خاموش کردن آتش به وسیلهی مکانیزم خاص خود را داراست. اساس کار این روبات برای پیدا کردن آتش بر گرمای محیط و دود موجود در هوا استوار است. به این صورت که این روبات دارای سنسورهای دما و دود در جلوی بدنهی خود است و طوری برنامه ریزی شده است که توسط اطلاعات ورودی از سنسورها مکان آتش را تشخیص داده و به طور دستی از طریق کامپیوتر به سمت آن حرکت میکند. به محض رسیدن به آتش به وسیله پمپاژ آب آتش را خاموش می کند.برنامهی روبات به زبان C نوشته شده و توسط میکروکنترلر AVR به اجرا درمیآید. در واقع میکروکنترلر همان مغز هوشمند روبات است که اطلاعات ورودی را پردازش نموده و در هر لحظه تصمیم مناسب را جهت چگونگی حرکت روبات و موتورها اتخاذ مینماید.
فهرست مطالب:
مقدمه
فصل اول: روباتها، تاریخچه و انواع آنها
1.1 مقدمه
1.2 روبات
1.2.1 تعاریف روبات
1.2.2 علم روباتیک
1.2.3 مزایای روباتها
1.2.4 معایب روباتها
1.3 تاریخچه روباتها
1.4 دسته بندی روباتها
1.4.1 دسته بندی اتحادیه روبات های ژاپنی
1.4.2 دستهبندی موسسه روباتیک آمریکا
1.4.3 دسته بندی اتحادیه فرانسوی روبات های صنعتی
1.5 انواع روباتها
1.6 طبقه بندی روباتها
1.6.1 طبقهبندی روباتها از نقطه نظرکاربرد
1.6.2 طبقهبندی از نقطه نظراستراتژی کنترل درنسل های روبات
1.6.3 طبقه بندی از نقطه نظر محرک مفصل ها
فصل دوم: اجزای روباتها
2.1 اجزای اصلی یک روبات
2.1.1 بازوی مکانیکی ماهر
2.1.2 سنسورها
2.1.3 کنترلرها
2.1.4 واحد تبدیل توان
2.1.5 محرکهای مفاصل
فصل سوم: مراحل ساخت روبات آتش نشان
3.1 روبات آتشنشان
3.2 قطعات مورد نیاز
3.3 شرح عملکرد روبات
3.4 مراحل ساخت روبات
پیوست
نحوه نوشتن برنامه در codevision
لبهی Chip
لبهی Port
Output value یا مقدار اولیه:
Pullup
مشکلات احتمالی

پروژه چرم مصنوعی و تأثیر فرمولاسیون در خواص فیزیکی چرم
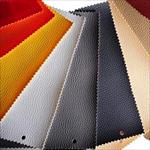
پروژه چرم مصنوعی و تأثیر فرمولاسیون در خواص فیزیکی چرم
فرمت فایل دانلودی: .docفرمت فایل اصلی: doc
تعداد صفحات: 62
حجم فایل: 571
قیمت: : 3850 تومان
بخشی از متن:
چکیده:
همانطور که میدانیم چربهای مصنوعی برخلاف چرمهای طبیعی که پس از دباغی کردن پوست گوسفند تهیه میگردند از مواد پلیمری که سنجش اعظم آن را پلیوینیل کلراید تشکیل میدهد تشکیل یافتهاند.
پلیوینیل کلراید (P.V.C) در سال 1835 در یک تحقیق آزمایشگاهی شناخته شد. اما به دلیل اقتصادی یک قرن بود در دهه 1920 وقتی که صنعت پلاستیک پیشرفت کرد شناخته شد. با وجود این پلاستیکهای با وزن مولکولی پائین باعث مهاجرت آنها به سطح و سپس تبخیر آنها میشد. این اتلاف خود باعث شکنندگی میشد که برای رفع این مشکل سطح P.V.C قالبریزی شده را چرب میکند که بویی شبیه پلاستی سایزر (نرم کننده) داشت و باعث رونیامدن مشتریها به آن میشد. ایجاد حالت پلاستیکی بوسیله مخلوط کردن P.V.C با مواد پلیمری به زودی معلوم کرد که بهترین پاسخ به این مشکل است.
مواد مخلوطی با P.V.C در دهه 1920 معرفی شدند. در سال 1928 اولین اختراعاتی که ثبت شد ماده تهنشین شده بوسیله I.G.Farbenindustrie و کربید و کربنهای شیمیایی برای مخلوط لاتکس PVC با پلیوینیل استات (PVAC) و پلیوینیل کلراید- CO- وینیل استات) PVCAC با 80 تا 95 درصد وزن VC بود. این مخلوط عایق رطوبتی به عنوان جانشین چرم استفاده میشد.
فهرست مطالب:
چکیده
فصل اول: مباحث نظری
Poly vinyl chloride
مخلوط PVC- NBR:
مخلوطهای PVC/ ACRYLIC:
مخلوطهای PVC/ELASTOMER:
مخلوطهای PVC/ PolyALKENE:
مخلوطهای PVC/ CPE, PVC/ CSR:
مخلوطهای PVC/Poly urethane:
مخلوطهای PVC/ EVAC, PVC/ EVAC-VC
مخلوطهای PVC/ABS
مخلوطهای رزین مهندسی PVC
Reasons for, benefits and Problems of blending
فصل دوم: مباحث علمی و عملی
مقدمه
آزمایش اول: اثر افزایش مواد فوم از بر پارامترهای فوم
آزمایش دوم: اثر افزایش DOP بر پارامترهای فوم
آزمایش سوم: اثر افزایش مواد فوم از بر پارامترهای فوم
آزمایش چهارم: اثر افزایش کربنات کلسیم بر پارامترهای فوم
آزمایش پنجم: اثر افزایش Asua بر پارامترهای فوم
فصل سوم: تست کدر شدن و بخار گرفتگی (fogging) روی منسوجات و چرم و نتیجه گیری
1- موضوع و زمینة کاربرد
2- مبنای آزمایش
3- تعریف عبارات و علائم
4- تجهیزات و شناساگرها
5- آماده سازی نمونه ها
6- روش انجام آزمایش
7- تشریح نتایج
8- پیشنهادات
فصل چهارم: منابع
مقاله کنترل بهینه توان راکتیو DG ها برای تنظیم ولتاژ سیستمهای توزیع MV
مقاله کنترل بهینه توان راکتیو DG ها برای تنظیم ولتاژ سیستمهای توزیع MV
فرمت فایل دانلودی: .zipفرمت فایل اصلی: doc, pdf
تعداد صفحات: 26
حجم فایل: 1717
قیمت: : 14000 تومان
بخشی از متن:
در این مقاله مسئله کنترل توان راکتیو واحدهای تولید پراکنده (DG) در سیستمهای توزیع ولتاژ متوسط(MV)، برای حفظ ولتاژ سیستم در محدوده از پیش مشخص شده بیان میشود.یک شیوه مناسب برای پخش بار، استفاده از ساختار توپولوژیکی است که برای سیستمهای توزیع شعاعی فرمولبندی شده است.روش تحلیل حساسیت ولتاژ مستقیم در این مقاله توسعه داده میشود که براساس ساختار توپولوژیکی شبکه است و همچنین مستقل از نقطه کار شبکه است و بدین صورت ماتریس حساسیت یک بار همراه با برنامه پخش بار محاسبه میشود و در تمام شرایط کاری سیستم از آن استفاده میشود.مسئله کنترل توان راکتیو DG ها،بعنوان یک مسئله بهینهسازی که از تحلیل حساسیت برای خطی کردن سیستم حول نقطه کار استفاده میکند،فرمولبندی میشود.هدف مسئله بهینه سازی برگرداندن ولتاژ سیستم به داخل محدوده مجاز بوسیله کنترل توان راکتیو DG ها با یک روش بهینه است.راهحلهای بهینه، بوسیله استفاده از الگوریتم ازدحام ذرات (PSO) بدست میآیند.سپس این نتایج با اجرای پخش بار با در نظر گرفتن مقادیر جدید توان راکتیو DG ها تایید میشوند.این روند تا زمانیکه که یک تخطی در ولتاژ مشاهده شود تکرار میشود.نتایج شبیه سازی نشان میدهد که الگوریتم ارائه شده،توانای حفظ ولتاژ در محدوده مجاز را دارد. (سال انتشار: 2015)
فهرست مطالب:
چکیده
مقدمه
کنترل ولتاژ در سیستمهای توزیع جدید
جبران توان راکتیو
روش مستقیم برای مطالعه پخش بار در سیستمهای توزیع
روش تحلیل حساسیت ولتاژ ارائه شده
فرمولبندی مسئله
الگوریتم بهینه سازی ازدحام ذرات(PSO)
سیستم مورد بررسی
نتایج شبیه سازی
مورد1:حالت بار کامل-مینیمم تولید
مورد2:ماکزیمم تولید-مینیمم بار
بحث کردن در مورد نتایج
نتیجهگیری
منابع (متن اصلی)
پاورپوینت درس مدارهای منطقی دیجیتال
پاورپوینت درس مدارهای منطقی دیجیتال
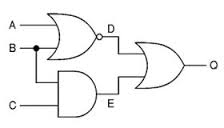
مرجع: مدارهای منطقی دیجیتال
نوشته: مانو-- مترجم:دکتر سپیدنام
تعداد صفحات : 250 اسلاید
تحقیق سنسور فشار
سنسور فشار
سنسور فشار چیست؟

سنسور فشار عموما فشار گاز یا مایع را اندازه می گیرد. فشار به اصطلاح نیروی لازم برای جلوگیری از پخش شدن مایع است و معمولاً به صورت نیرو بر سطح تعریف می شود. سنسور فشار معمولاً به صورت مبدلکار میکند و سیگنالی تابع اثر فشار تولید می کند. برای این منظور می توان سیگنال الکتریکی در نظر گرفت. سنسورهای فشار روزانه برای کنترل و مانیتورینگ هزاران کاربرد استفاده می شوند. سنسورهای فشار می توانند به طور غیر مستقیم برای اندازه گیری سایر متغیرها استفاده شوند.
تعداد صفحات : 21
پاورپوینت انرژی های نو (انرژی های نو سیستم های قدرت )
پاورپوینت انرژی های نو (انرژی های نو سیستم های قدرت )
این پاور پوینت با عنوان انرژی های نو ،انرژی های نو سیستم های قدرت را مورد بررسی قرار می دهد. که شامل عناوین زیر می باشد.

انرژی های نو سیستم های قدرت
انرژیهای نو
انرژی خورشیدی
فن آوری هیدروژن، پیل سوختی و زیست توده
منابع
تعداد صفحات : 19 اسلاید
پایان نامه نیروگاه بادی

پایان نامه نیروگاه بادی
فرمت فایل دانلودی: .zipفرمت فایل اصلی: doc, dz
تعداد صفحات: 124
حجم فایل: 2395
قیمت: : 30000 تومان
بخشی از متن:
بخشی از گزیده:
باد یک منبع ارزان، تمیز و غیر قابل تمام شدن می باشد. از زمانهای قدیم از باد برای به حرکت در آوردن کشتی های بادبانی و از توربینهای بادی جهت آسیاب گندم و آبیاری استفاده شده است. در حقیقت ایرانیان اولین انسانهایی بودند که در قرن هفتم میلادی به این نوع انرژی پی بردند و از آن برای به حرکت در آوردن آسیابهایی با توربینهایی از نوع عمودی استفاده نمودند سپس سایر ملتها و اقوان از آن استفاده کردند. دانمارک اولین کشوری بود که در سال 1890 میلادی از باد برای تولید الکتریسیته استفاده نمود بعد از آن به تدریج در نقاط مختلف دنیا نیروگاههای بادی با محور عمودی و افقی ساخته و نصب شد . اصولاً باد به عنوان یک مبنع انرژی دارای مزایای زیر می باشد: ...
فهرست مطالب:
گزیده
مقدمه
فصل اول
مسائل اقتصادی نیروگاههای بادی
مسایل فنی نیروگاههای بادی
انرژی دریافتی از توربین
محل استقرار توربینهای بادی
فصل دوم
ساختمان توربینهای بادی
انواع توربینهای بادی
ماشینهای با محور عمودی
کاربرد توربینهای بادی
- کاربردهای منفصل از شبکه
- کاربردهای متصل به شبکه برق رسانی
سازندگان توربینهای بادی
فصل سوم
محاسبه تقریبی توان خروجی توربینهای بادی
ارائه مدل مدولار و دقیق نیروگاه بادی
بدست آوردن مدل دقیق توربین بادی به صورت مدولار
- توان قابل استحصال از باد
- بهره مکانیکی- آیرودینامیکی توربین
- برهم کنش باد و پره ها
- نوسانات ویژه مکانیکی
- مدل شفت
- مدل گذاری ژنراتور القایی
استفاده از مدل پیشرفته توربین بادی در مطالعات سیستم قدرت
روشی در انتخاب بهینه اندازه وتعداد توربینهای بادی دریک سیستم بادی جدا از شبکه
- سیستم مورد مطالعه
- فرمول بندی مساله
-- تابع هدف
-- بالانس انرژی
-- نحوه محاسبه توان خروجی از هر توربین بادی
-- قابلیت اطمینان
- الگوریتم
- مثال عملی
فصل چهارم
نرم افزار ویژوال ویدا (Visual WIDA)- نرم افزرتحلیل داده های انرژی باد
مقدمه
تئوری آماری تحلیل داده های باد
نمودار ویبول و رایلی
- نرم افزار ویژوال ویدا
-- ورودی و خروجی برنامه
-- تحلیل اقتصادی
-- ارائه یک مثال عملی
فصل پنجم
شبیه سازی توربین بادی با نرم افزار مطلب
- معرفی simulink
- معرفی المانهای شبکه
-- شبیه سازی
بخش اول: مقادیر steady state در وضعیت عادی شبکه
بخش دوم: شبکه در حالت بارگذاری سلفی
بخش سوم: شبکه در وضعیت بار پذیری خازنی
بخش چهارم: شبکه در حالت اتصال کوتاه متقارن و نامتقارن
منابع
پرداخت با کلیه کارتهای عضو شتاب امکان پذیر است.خلاصه کتاب الکترونیک نوری 1 (Optoelectronics and Photonics)

خلاصه کتاب الکترونیک نوری 1 (Optoelectronics and Photonics)
فرمت فایل دانلودی: .rarفرمت فایل اصلی: pdf
تعداد صفحات: 246
حجم فایل: 7745
قیمت: : 1500 تومان
بخشی از متن:
توضیحات:
خلاصه الکترونیک نوری از کتاب Optoelectronics and Photonics, S. O. Kasap, Principles and Practices, Prentice Hall, 2001، شامل هفت فصل به زبان انگلیسی ساده و تصاویر رنگی
فهرست فصول:
فصل 1 . طبیعت موج نور
فصل 2 . دی الکتریک و نوری موجبرها
فصل 3 . LED
فصل 4 . لیزر
فصل 5 . آشکارسازها
فصل 6 . فتوولتائیک
فصل 7 . قطبش و مدولاسیون نور
پرداخت با کلیه کارتهای عضو شتاب امکان پذیر است.پروژه کاربینی پالایشگاه گاز (فازهای 15 و 16 پارس جنوبی)

پروژه کاربینی پالایشگاه گاز (فازهای 15 و 16 پارس جنوبی)
فرمت فایل دانلودی: .pdfفرمت فایل اصلی: pdf
تعداد صفحات: 12
حجم فایل: 984
قیمت: : 4000 تومان
بخشی از متن:
توضیحات:
این پروژه کاربینی مربوط به پالایشگاه گازی فاز 15و 16 می باشد که در ابتدا به معرفی پروسه یکی از ترن های پالایشگاه پرداخته سپس تعدادی از تجهیزات ابزاردقیق را شرح و پروسه انها از اندازه گیری تا اتاق کنترل را توضیح می دهد در اخر هم به شرح درباره سیستم dcs شرکت yokogawa و نحوه کار با نرم افزار centium cs3000 و مانیتورینگ سایت می پردازد.
مقدمه:
پروژه های پارس جنوبی مشتمل بر تاسیسات دریایی، خطوط لوله زیر آبی و پالایشگاه خشکی می باشد. بر اساس مطالعات انجام شده برای تولید یک میلیون فوت مکعب گاز حدود 10-12 چاه مورد نیاز است که این چاهها از طریق یک سکوی سر چاهی حفر می شوند بنابراین هر فاز پارس جنوبی مشتمل بر یک سکوی سر چاهی و یک خط لوله زیر آبی 32 اینچی می باشد ولی برای اکثر پروژه های پارس جنوبی گاز تولیدی در دو سکو و در یک پالایشگاه خشکی فراوری می شود ، یکی از پالایشگاه های در دست ساخت پالایشگاه فاز های 16 و 15 پارس جنوبی می باشد که مشتمل بر 50 یونیت می باشد گاز مورد نیاز این پالایشگاه از سکوی های فاز 15 و 16 دریا که در اواخر سال 93 به بهره برداری رسید تامین می شود. درحال حاضر تیم لوپ چک در حال کار بر روی یونیت های 113 (احیا کاستیک)، 114 (شیرین سازی پروپان)، 115 (شیرین سازی بوتان) می باشند.
فهرست مطالب:
مقدمه
پروسه گاز
تجهیزات ابزار دقیق
سیستم کنترل
کار با نرم افزار
آموزش لوپ چک
منابع
پرداخت با کلیه کارتهای عضو شتاب امکان پذیر است.پروژه منابع تغذیه سوئیچینگ (Switching power Supply )

پروژه منابع تغذیه سوئیچینگ (Switching power Supply )
فرمت فایل دانلودی: .docxفرمت فایل اصلی: docx
تعداد صفحات: 58
حجم فایل: 707
قیمت: : 5500 تومان
بخشی از متن:
بخشی از متن:
منبع تغذیه سوئیچینگ (Switched-mode power Supply) یا SMPS یک واحد تغذیه توان (PSU) است که به روش سوئیچینگ عمل رگولاسیون را انجام میدهد. برای ثابت نگه داشتن ولتاژ در خروجی یک منبع تغذیه، دو روش رگولاسیون خطی و رگولاسیون به روش سوئیچینگ رایج میباشد. در روش رگولاتور خطی از ترانس و المانهای یکسو کننده جریان و فیلتر استفاده میشود. نقطه ضعف این روش، تلفات بالا و بازدهی پائین و عدم دسترسی به رگولاسیون دقیق و کیفیت دلخواه در خروجی منبع تغذیه خطی میباشد. این دو روش را میتوان به صورت زیر مقایسه کرد:
1- فرکانس کار ترانسها در روش خطی 50 تا 60 هرتز است. ترانسهای فرکانس پایین، اندازه و حجم بزرگی دارند. در روش سوئیچینگ به دلیل استفاده از فرکانس بالای 50 تا 200 کیلوهرتز، حجم و وزن ترانسها به میزان قابل توجهی کاهش مییابد.
2- راندمان یا بازده توان در روش سوئیچینگ بسیار بیشتر از روش خطی است. یک منبع خطی با تلف کردن توان، خروجی خود را رگوله میکند ولی در روش سوئیچینگ با تغییر میزان دوره سیکل سوئیچ یا همان duty cycle میتوان ولتاژ و جریان خروجی را کنترل کرد.
با یک طراحی خوب در روش سوئیچینگ میتوان به حدود 90% بازدهی دست یافت. در توانهای بالا از روش PWM و در توانهای پائین تر از 30 وات معمولاً از روش کلید زنی به صورت پالسهای معمولی استفاده میشود.
پرداخت با کلیه کارتهای عضو شتاب امکان پذیر است.