پروژه ها و تحقیقات دانشجویی
فروشگاه دانلود پروژه ها ،مقاله و تحقیقات دانشجویی - project , computer , book , pdf , word, پروژه , تحقیق , مقاله , کارآموزی , پایان نامه , عمران , کامپیوتر , ساختمان , الکترونیکپروژه ها و تحقیقات دانشجویی
فروشگاه دانلود پروژه ها ،مقاله و تحقیقات دانشجویی - project , computer , book , pdf , word, پروژه , تحقیق , مقاله , کارآموزی , پایان نامه , عمران , کامپیوتر , ساختمان , الکترونیکپروژه افزایش کارایی نیروگاه گازی توسط خنک سازی ورودی (fogging)

پروژه افزایش کارایی نیروگاه گازی توسط خنک سازی ورودی (fogging)
فرمت فایل دانلودی: .rarفرمت فایل اصلی: doc
تعداد صفحات: 248
حجم فایل: 6536
قیمت: : 8000 تومان
بخشی از متن:
بخشی از چکیده:
سرد کردن هوای ورودی یکی از موثرترین راههابرای افزایش ظرفیت توربین های احتراقی (CT) در محیطهایی با درجه حرارت بالا, میباشند.
البته هنوز این عمل به طور گسترده در توربیبن های نوع صنعتی بزرگ پذیرفته نشده است.در بیش از صد نمونه تا سیسات نصب شده که در آن ها روش خنک کاری هوای ورودی، به منظور مقابله با شرایط جوی، اعمال شده است؛ تنها چند نمونه از توربین های احتراقی بزرگ صنعتی وجود دارند.
این مزایا همچنین قابل اعمال به اینگونه ماشین ها (توربیبن های بزرگ صنعتی) به منظور مقابله با شرایط مختلف جوی هستند.
افزایش ظرفیت برای نوع جدید سیتی های تولیدی که در دمای بالا آتش می شوند و هوای کمتری نسبت به کیلو وات تولیدی مصرف میکنند برای سرمایه گذاری بسیار ارزشمند است.
خروجی توربین به نسبت میزان جریان توده هواست.در محیط های با درجه حرارت بالاتر،ظرفیت توربین احتراقی مقداری کاهش میابد.
فهرست مطالب:
فصل اول: انواع نیروگاه ها
نیروگاه آبی
نیروگاه بخاری
نیروگاه هسته ای
نیروگاه اضطراری
نیروگاه گازی
فصل دوم: ساختمان توربین گازی
کمپرسور
محفظه احتراق
توربین
فصل سوم: تعریف مسأله و ضرورت خنک کردن هوای ورودی کمپرسور
سیستمهای خنک کننده تبخیری
1- سیستم air washer
2- سیستم خنک کننده media
3- سیستم فشار قوی fog
سیستمهای خنک کننده برودتی
1- چیلرهای تراکمی
2- چیلرهای جذبی
سیستمهای ذخیره سازی سرما
فصل چهارم: بررسی انواع سیستمها
سیستم تماس مستقیم
سیستم غیر تماسی
خنک سازی تبخیری به وسیله فاگینگ (مه پاشی)
تولید fog
توزیع اندازه ذرات
ملاحظات خوردگی در کمپرسورهای توربین گاز
نحوه توزیع fog- فاکتور موثر بر تبخیر
سیستم کنترل
مکان نازلها در توربین گازی
کیفیت اب مصرفی
نمودار رطوبت سنجی پاشش ورودی
شرایط محیطی و قابلیت کاربرد پاشش fog در ورودی
اسیب FOD
موارد یخ زدگی
تحریک کمپرسور
تغییر شکل حرارتی ورودی
مسایل مربوط به خراب شدن
خوردگی در مجرای ورودی
فرسودگی روکش کمپرسور
انتخاب سیستم مناسب
بررسی اقتصادی
خنک سازی هوای دهانة ورودی- ویژگی طراحی و عوامل اقتصادی
امور اقتصادی و مالی (تأمین بودجه)
راه حل b/o /o در polar works
سرمایه گذاری بلند مدت در مقابل سرمایه گذاری کوتاه مدت
راهکار POLAR WORKS
مقایسه تکنولوژی فاگینگ در مقابل سیستم POLAR
ظرفیت و گنجایش اضافی و عوامل اقتصادی و اعتباری آن
ارزیابی بهینه سازی پروژه های نیروی جدید با خنک کردن هوای ورودی به توربین گازی
سیستم خنک کننده مهی با روش نوری برای توربین گازی
خنک سازی دهانه هوا برای توربینهای گازی با سیستم optiguide
تزریق swirl flash برای بهبود کارکرد نیروگاه
فصل پنجم: هوشمند سازی
راه هوشمندانهای برای رسیدن به قدرت بیشتر از یک توربین گازی وجود دارد
چکیده مطالب
خنک سازی ورودی
مه پاشی (fogging)
اثر فاگینگ در نیروگاه قم
پیوست
منابع و ماخذ

پروژه اصول طراحی پستهای فشار قوی و معیارهای طراحی بهینه پست فشار قوی تاکستان

پروژه اصول طراحی پستهای فشار قوی و معیارهای طراحی بهینه پست فشار قوی تاکستان
فرمت فایل دانلودی: .rarفرمت فایل اصلی: doc
تعداد صفحات: 250
حجم فایل: 8463
قیمت: : 4000 تومان
بخشی از متن:
بخشی از مقدمه:
نیروی برق در چهارم سپتامبر 1882 برای اولین بار در خیابان پرل 1 در شهر نیویورک برای مصرف روشنایی استفاده شد. چند ژنراتور DC با توان مجموع 30 کیلووات و ولتاژ 110 ولت بکار گرفته شده بودن تا بتوانند نیاز مصرفی 59 مصرف کننده را در مساحتی در حدود یک کیلومتر مربع برآورده سازند.
با گسترش سیستمهای DC سه سیمه با ولتاژ 220 ولت و افزایش بار و طول خطوط مشکلاتی از قبیل تلفات و افت ولتاژ پیش آمد که منجر به ساخت ترانسفورماتور توسط ویلیام استنلی2 در مقیاس تجاری در سال 1885 گردید. با ساخت ترانسفورماتور قابلیت انتقال انرژی با ولتاژ بالا و تلفات کم به وجود آمد و سیستمهای AC جایگزین سیستمهای DC شدند. اولین خط AC تکفاز در سال 1889 در ارگن3 با ولتاژ کیلو ولت و طول 21کیلومتر مابین ارگن و پورتلند4 کشیده شد.[12]
صنعت برق ایران نیز از سال 1283 شمسی با برهره برداری از یک ژنراتور 400 کیلووات که توسط حاج امین الضرب نصب و راه اندازی گردید، آغاز شد.[1] مسیر اولین شبکه در تهران از خیابانهای لاله زار، ارک، سعدی و ناصرخسرو می گذشت. محل مولد در خیابان چراغ برق در کوچه امین قرارداشت و بوسیله بخار با حرکت نوسانی کارمی کرد. ولتاژ مولد 400 ولت و فرکانس آن 50 هرتز بود. شبکه آن در خیابانهای اصلی سه فاز با تیرهای چوبی بلند و مقره های شترگلو و در کوچه های فرعی از یک فاز و نول تشکیل شده بود.
فهرست مطالب:
فصل اول: مقدمه
۱-۱-مقدمه
۲-۱-تعاریف و اصطلاحات
فصل دوم: اصول طراحی پستهای فشار قوی و معیارهای طراحی بهینه
۱-۲-اصول طراحی پستهای فشار قوی
۲-۲-انواع طراحیها
۳-۲-معیارهای طراحی بهینه و اعمال این ضوابط در طراحی پست
۱-۳-۲-ارتباط بهینگی و شرایط بهره برداری
۲-۳-۲-ارتباط بهینگی و موقعیت پست
۳-۳-۲-ارتباط بهینگی ومسایل زیست محیطی
۴-۳-۲-ارتباط بهینگی و امکان توسعه پست
۵-۳-۲-ارتباط بهینگی و نیروی انسانی
۶-۳-۲-ارتباط بهینگی و تعمیرات و نگهداری
۷-۳-۲-ارتباط بهینگی و سرمایه گذاری اولیه
۸-۳-۲-ارتباط بهینگی و هزینه های دوران بهره برداری
۹-۳-۲-ارتباط بهینگی و ایمنی
۱۰-۳-۲-ارتباط بهینگی و طرحها و مشخصات فنی سیستم های مختلف پست
فصل سوم: انواع پستها
۱-۳-تقسیم بندی پستها بر اساس سطح ولتاژ
۲-۳-تقسیم بندی پستها بر اساس وظیفه ای که در شبکه دارند
۳-۳-تقسیم بندی پستها از نظر نحوه نصب
۱-۳-۳- انواع پستهای باز
۲-۳-۳-انواع پستهای بسته
۳-۳-۳-پستهای ترکیبی
۴-۳-۳-پستهای سیار
۴-۳-انواع پستها از نظر آرایش شینه بندی
۱-۴-۳-مزایا و معایب آرایشهای مختلف شینه بندی
۱-۱-۴-۳-شینه ساده
۲-۱-۴-۳-شینه اصلی و فرعی
۳-۱-۴-۳-شینه دوبل
۴-۱-۴-۳-شینه دوبل اصلی با شینه فرعی
۵-۱-۴-۳-شینه دوبل دوکلیدی
۶-۱-۴-۳-شینه یک ونیم کلیدی
۷-۱-۴-۳-شینه حلقوی
۲-۴-۳- بررسی مقایسه ای برای انتخاب شینه بندی بهینه[۹]
۳-۴-۳-نگاه آماری به وضعیت شینه بندی های موجود در پست های ۲۳۰و۴۰۰کیلوولت ایران
۴-۴-۳-آرایش پیشنهادی برای شینه بندی پستها
فصل چهارم: انتخاب محل پست و جانمایی تجهیزات
۱-۴-انتخاب محل پست
۲-۴-جانمایی تجهیزات پست
۱-۲-۴-تاثیر نوع شینه ها و سکسیونرها در آرایش فیزیکی تجهیزات
۲-۲-۴-ترتیب و نحوه نصب تجهیزات
۳-۲-۴-محل احداث ساختمانها و جاده های ارتباطی
فصل پنجم: انتخاب تجهیزات پست
۱-۵-انتخاب ترانسفورماتور قدرت
۲-۱-۵-معیارهای انتخاب بهینه ترانسفورماتور قدرت
۱-۲-۱-۵-نوع ترانسفورماتورقدرت
۲-۲-۱-۵-سیستم خنک کنندگی ترانسفورماتور
۳-۲-۱-۵-تلفات ترانسفورماتور
۴-۲-۱-۵-توان نامی سیم پیچهای ترانسفورماتور
۵-۲-۱-۵-ولتاژ نامی سیم پیچ
۶-۲-۱-۵-نحوه اتصالات سیم پیچها و گروه برداری
۷-۲-۱-۵-تنظیم ولتاژ و مشخصات تپ چنجر
۸-۲-۱-۵-تاثیر زمین نمودن نوترال در عایق بندی
۹-۲-۱-۵-حداکثر ولتاژ هر یک از سیم پیچها
۱۰-۲-۱-۵-تعیین سطوح عایقی داخلی و خارجی و نوترال
۱۱-۲-۱-۵-میزان افزایش مجاز درجه حرارت روغن وسیم پیچ
۱۲-۲-۱-۵-امپدانس ولتاژ و امپدانس اتصال کوتاه
۱۳-۲-۱-۵-میزان مجاز صدا
۱۴-۲-۱-۵-مقادیر جریانهای اتصال کوتاه سیستم
۱۵-۲-۱-۵-اضافه بار در ترانسفورماتور
۱6-۲-۱-۵- استفاده از محفظه کابل در طرف فشار ضعبف
۲-۵-انتخاب ترانسفورماتور جریان
۱-۲-۵-اطلاعات مورد نیاز جهت انتخاب ترانسفورماتورجریان
۲-۲-۵-معیارهای انتخاب بهینه ترانسفورماتورجریان
۱-۲-۲-۵-نوع ترانسفورماتورجریان
۲-۲-۲-۵-حداکثر ولتاژ سیستم
۳-۲-۲-۵-سطوح عایقی
۴-۲-۲-۵-فاصله خزشی مقره
۵-۲-۲-۵-جریان نامی اولیه
۶-۲-۲-۵-جریان نامی ثانویه
۷-۲-۲-۵-نسبت تبدیل
۸-۲-۲-۵-جریان نامی حرارتی کوتاه مدت
۹-۲-۲-۵-جریان نامی دایمی حرارتی
۱۰-۲-۲-۵-محدودیت افزایش درجه حرارت
۱۱-۲-۲-۵-ظرفیت نامی خروجی
۱۲-۲-۲-۵-کلاس دقت
۳-۵-انتخاب ترانسفورماتور ولتاژ
۱-۳-۵-اطلاعات مورد نیاز جهت انتخاب ترانسفورماتور ولتاژ
۲-۳-۵-معیارهای انتخاب بهینه ترانسفورماتور ولتاژ
۱-۲-۳-۵-نوع ترانسفورماتورولتاژ
۲-۲-۳-۵-حداکثر ولتاژ سیستم
۳-۲-۳-۵-سطوح عایقی
۴-۲-۳-۵-فاصله خزشی مقره
۵-۲-۳-۵-ولتاژ نامی ثانویه
۶-۲-۳-۵-ضریب ولتاژ نامی [۹]
۷-۲-۳-۵-مشخصات خازن ترانسفورماتور ولتاژ خازنی
۸-۲-۳-۵-محدودیت افزایش درجه حرارت
۹-۲-۳-۵-ظرفیت خروجی
۱۰-۲-۳-۵-کلاس دقت[۲۲]
۴-۵-انتخاب ترانسفورماتور زمین- کمکی
۱-۴-۵-اطلاعات مورد نیاز جهت ترانسفورماتورزمین-کمکی[۱۴]
۲-۴-۵-معیارهای انتخاب بهینه ترانسفورماتور زمین-کمکی
۱-۲-۴-۵-نوع ترانسفورماتور زمین –کمکی
۲-۲-۴-۵-سیستم خنک کننده
۳-۲-۴-۵-ظرفیت نامی
۴-۲-۴-۵-مقدار نامی ولتاژ سیم پیچ ها
۵-۲-۴-۵-حداکثر ولتاژ سیم پیچ ها
۶-۲-۴-۵-امپدانس ولتاژ[۹]
۷-۲-۴-۵-استقامت عایقی بوشینگ ها و ترمینال های فاز و نقطه صفر سیم پیچ اولیه
۸-۲-۴-۵-افزایش دما پس از بارگذاری جریان کوتاه مدت
۹-۲-۴-۵-افزایش دمای مجاز
۱۰-۲-۴-۵-تپ چنجر
۱۱-۲-۴-۵-فاصله خزشی بوشینگها
۱۲-۲-۴-۵-سطح صدا
۱۳-۲-۴-۵-ترمینال بندی طرف اولیه وثانویه
۵-۵-انتخاب کلید قدرت
۱-۵-۵-اطلاعات مورد نیاز جهت انتخاب بهینه کلید قدرت
۲-۵-۵-معیارهای انتخاب بهینه کلید قدرت
۱-۲-۵-۵-نوع کلید
۲-۲-۵-۵-نوع مکانیسم قطع و وصل
۳-۲-۵-۵-ولتاژ نامی
۴-۲-۵-۵-سطوح عایقی نامی
۵-۲-۵-۵-جریان نامی
۶-۲-۵-۵-جریان نامی قطع اتصال کوتاه
۷-۲-۵-۵-جریان نامی قطع شارژ خط
۸-۲-۵-۵-جریان نامی قطع بار اندوکتیو
۹-۲-۵-۵-ضریب افزایش ولتاژ فاز سالم
۱۰-۲-۵-۵-جریان نامی اتصال کوتاه وصل
۱۱-۲-۵-۵-مدت زمان تحمل اتصال کوتاه
۱۲-۲-۵-۵-زمان قطع نامی
۶-۵-سکسیونر و تیغه زمین
۱-۶-۵-اطلاعات مورد نیاز جهت انتخاب بهینه سکسیونر
۲-۶-۵-معیارهای انتخاب بهینه سکسیونر
۱-۲-۶-۵-نوع سکسیونر یا تیغه های زمین
۲-۲-۶-۵-نوع مکانیسم عملکرد
۳-۲-۶-۵-ولتاژ نامی
۴-۲-۶-۵-سطوح عایقی نامی
۵-۲-۶-۵-جریان نامی (فقط برای سکسیونر)
۶-۲-۶-۵-جریان نامی اتصال کوتاه
۷-۲-۶-۵-جریان نامی وصل اتصال کوتاه(فقط برای تیغه های زمین)
۸-۲-۶-۵-مدت زمان تحمل جریان اتصال کوتاه
۹-۲-۶-۵-نیروی مکانیکی نامی ترمینالها
فصل ششم: سیستمهای حفاظتی پست
۱-۶-سیستم زمین
۱-۱-۶-اطلاعات موردنیاز برای طراحی سیستم زمین
۲-۱-۶-آزمونهای زمین پست
۳-۱-۶-موارد مهم در آزمونهای سیستم زمین
۴-۱-۶-پارامتر ها و موارد حائز اهمیت در طراحی بهینه سیستم زمین
۱-۴-۱-۶-انتخاب هادی زمین و میله های زمین
۲-۴-۱-۶-اتصال تجهیزات به زمین
۳-۴-۱-۶-محاسبه جریان اتصال کوتاه وحداکثرجریان شبکه زمین
۴-۴-۱-۶-ولتاژانتقالی ونقاط خطرناک
۵-۴-۱-۶-تداخل با کبلهای مخابراتی و کنترل
۶-۴-۱-۶-اتصال زمین سیستم تغذیه فشار ضعیف
۵-۱-۶-نصب سیستم زمین
۶-۱-۶-روش قدم به قدم طراحی
۲-۶-سیستم حفاظت از صاعقه
۱-۲-۶-سیستم حفاظت از صاعقه
۱-۱-۲-۶-اطلاعات مورد نیاز جهت طراحی سیستم حفاظت از صاعقه
۲-۱-۲-۶-سیستم حفاظتی پست با استفاده از روش الکتریکی-هندسی[۹]
۳-۱-۲-۶-حداکثر ولتاژ قابل تحمل توسط پست
۴-۱-۲-۶-امپدانس موجی
۵-۱-۲-۶-محاسبه جریان بحرانی وفاصله جذب بحرانی S
۶-۱-۲-۶-محاسبه ارتفاع هادیهای حفاظتی
۷-۱-۲-۶-حفاظت در مقابل صاعقه هایی که در خارج از سطح محاط
دو هادی حفاظتی فرود می آیند
۸-۱-۲-۶- استقامت مکانیکی وحرارتی هادیهای حفاظتی و میله های برقگیر
۲-۲-۶-برقگیر و محل نصب آن
۱-۲-۲-۶-انواع برقگیر[۱۸]
۲-۲-۲-۶-مقایسه اجمالی بین برقگیرهای ZnO و برقگیرهای مرسوم
۳-۲-۲-۶-محل نصب برقگیر
۳-۶-سیستم حفاظتی و رله گذاری
۱-۳-۶-اصول اساسی در رله گذاری حفاظتی
۲-۳-۶-سیستمهای حفاظتی معمول[۹]
۳-۳-۶-معیارهای طراحی بهینه سیستم حفاظت ورله گذاری
۱-۳-۳-۶-حفاظت خطوط انتقال
۲-۳-۳-۶-حفاظت شینه
۳-۳-۳-۶-حفاظت ترانسفورماتور
فصل هفتم: نمونه طراحی
۱-۷-مشخصات مفروض برای پست
۲-۷-انتخاب تجهیزات
۳-۷-طراحی سیستمهای
۴-۷-روش قدم به قدم طراحی جانمایی تجهیزات
فصل هشتم: بهره برداری
۱-۸-مشخصات فنی پست مذکور
۲-۸-طریقه بهره برداری
۳-۸-دستورالعمل عملیاتی و و بهره برداری پست های انتقال و فوق توزیع
۴-۸-دستورالعمل بازدید اپراتور از برخی از تجهیزات پست
۵-۸-قواعد اساسی ایمنی
پیوستها
پیوست ۱:سیستم آلارمهای حفاظتی
پیوست ۲: نقشه های سیستم های حفاظتی و ارتینگ و …
پروژه بررسی آثار کنترل دور موتورهای بزرگ نیروگاهی

پروژه بررسی آثار کنترل دور موتورهای بزرگ نیروگاهی
فرمت فایل دانلودی: .rarفرمت فایل اصلی: doc
تعداد صفحات: 94
حجم فایل: 7758
قیمت: : 4000 تومان
بخشی از متن:
بخشی از متن:
در موتورهای با رتور سیم پیچی شده ، مقاومت سه فاز خروجی به رینگ های موتور مانند شکل (2-1الف) متصل می شود. گشتاور تولیدی با تغییر مقاومت Rx تغییر می کند. اگر Rx به سیم پیچی استاتور ارجاع شود و به Rr اضافه گردد. از رابطه (1-1) برای تعیین گشتاور تولیدی می توان استفاده کرد. مشخصات گشتاور- سرعت برای مقادیر مختلف مقاومت رتور در شکل (2-1 ب) نشان داده شده است. این روش باعث افزایش گشتاور راه اندازی و کاهش جریان راه اندازی می شود. باوجود این، روش مذکور ناکافی است، و اگر مقاومتهای مدار رتور برابر نباشد، ولتاژها و جریانهای غیر متقارن خواهد شد. مقاومتهای سه فاز را می توان با یکسو کننده های دیودی سه فاز و یک چاپر مانند شکل (3-1 الف) تعویض کرد که در آن GTO بعنوان کلید چاپر کار می کند. سلف Ld مانند منبع جریان ld عمل کرده و چاپر مقاومت مؤثر را تغییر می دهد و مقدار آن از معادله (4-1) زیر بدست می آید: ...
فهرست مطالب:
فصل اول:
(۱-۱) روشهای کنترل سرعت و گشتاور موتورهای القایی سه فاز
کنترل ولتاژ استاتور
۲- کنترل ولتاژ رتور
۳- کنترل فرکانس
۴- کنترل ولتاژ و فرکانس
۵- کنترل جریان
۶- کنترل ولتاژ، جریان و فرکانس
فصل دوم:
(۱-۲)روش های PWM در کنترل دور موتور آسنکرون
۱- روش PWM سینوسی (sinusoidal PWM)
2- روش PWM با نمونه برداری یکنواخت (uniform sampling PWM)
۳- روش حذف هارمونیها (Selectiv harmonic elimination)
۴- روش مینیم سازی THD جریان موتور
۵- روش suboptimal PWM
6- مقایسه روش suboptimal با روشهای Regular sampling، حذف هارمونی و مینیمم سازی دقیق THD
7- روش HVSO (High voltage suboptimal)
(۲-۲)انتخاب جداول
فصل سوم:
(۱-۳) مشخصات کلی سیستم
میکروپروسسورz80
(2-3) بلوک دیاگرام
فصل چهارم:
(۱-۴) نحوه کنترل
(۲-۴) سخت افزار سیستم
۱- بخش پردازشگر
(۲) بخش ساخت موج PWM
( 3) مدار دور سنج
۴- بخش فیدبک برد میکروپروسسور
(۵) بخش صفحه کلید و نمایشگر
(۲-۴) اینتراپت های موجود در سیستم
فصل پنجم:
(۱-۵) نرم افزا سیستم
(۲-۵) روتین lnitialize
(3-5) روتین اینتراپت KBD
(4-5) روتین اینتراپت Timer
(۵-۵) روتین Main
(6-5)روتین اینتراپت عرض پالس فازهای مختلف : PW-RPW-S . PW-T
(7-5) روتین تغییر جدول عرض پالس CHPWT
(8-5) روتین Initialize ابتدای کار (Start-Init )
پروژه بررسی اینورتر (تبدیل AC به DC) در موتورهای الکتریکی

پروژه بررسی اینورتر (تبدیل AC به DC) در موتورهای الکتریکی
فرمت فایل دانلودی: .rarفرمت فایل اصلی: doc
تعداد صفحات: 177
حجم فایل: 4630
قیمت: : 3000 تومان
بخشی از متن:
بخشی از متن:
همانطور که می دانیم وظیفه اینوتر تبدیل dc به ac می باشد که این کار هم در فرکانس ثابت و هم در فرکانس متغیر صورت می گیرد . ولتاژ خروجی می تواند در یک فرکانس متغیر یا ثابت دارای دامنه متغیر یا ثابت باشد که ولتاژ خروجی متغیر می تواند با تغییر ولتاژ ورودی dc و ثابت نگهداشتن ضریب تقویت اینوتر بدست آید. از سوی دیگر اگر ولتاژ ورودی dc ثابت و غیرقابل کنترل باشد.
می توان برای داشتن یک ولتاژ خروجی متغیر از تغییر ضریب تقویت اینوتر که معمولاً با کنترل مدولاسیون عرض پالس ( PWM ) در اینورتر انجام می شود استفاده کرد. ضریب تقویت اینوتر عبارت است از نسبت دامنه ولتاژ ac خروجی به dc ورودی.
اینوترها به دو دسته تقسیم می شوند: 1) اینوترهای تک فاز و 2) اینورترهای سه فاز. که خود آنها نیز بسته به نوع کموتاسیون تریستورها به چهار قسمت تقسیم می شوند . الف. اینوتر با مدولاسیون عرض پالس ( PWM ) ، ب. اینوتر با مدار تشدید، پ. اینوتر با کموتاسیون کمکی، ت. اینوتر با کموتاسیون تکمیلی. که اگر ولتاژ ورودی اینوتر، ثابت باشد، اینوتر با تغذیه ولتاژ ( VSI ) و اگر ورودی ثابت باشد، آن را اینوتر با تغذیه جریان ( CSI ) می نامند.
از بین اینورترهای تکفاز دو نوع معروف به نام اینوتر تکفاز با سر وسط و اینوتر پل تکفاز می باشد که در اینجا به اختصار نوع پل تکفاز آن را بررسی کرده و سپس راجع به اینوترهای سه فاز توضیح خواهیم داد.
فهرست مطالب:
فصل اول: مدارهای مورد نیاز برای کنترل موتور القایی
اینورتر
1-1- اینورتر پل تکفاز
1-2- اینورتر تکفاز PWM
2- اینورترهای سه فاز
3- اینورتر با تشدید سری
4- اینورترهای منبع جریان
4-1- اینورتر منبع جریان سه فاز
5- منابع جریان
5-1- مدولاسیون پهنای پالس در یک اینورتر منبع جریان تریستوری
6- مقایسه محرکه های اینوتر منبع جریان و ولتاژ
فصل دوم: کنترل موتور القایی
مقدمه
1- اصول کنترل سرعت موتورهای القایی
2- کنترل لغزش
3- روشهای کنترلی موتورهای القایی، کنترل کننده اسکالر
4- کنترل کننده اسکالر درایوهای موتور القایی با اینورتر VSI
4-1- کنترل کننده سرعت، مدار باز
4-2- کنترل کننده سرعت مداربسته با محدود کننده جریان
5- کنترل کننده سرعت مدار باز ، در شیراط کنترل V/F
6- کنترل برداری
6-1- انواع روشهای کنترل برداری
6-2- کنترل برداری مستقیم با جهت یابی شار فاصه هوایی و اینورتر PWM با جریان کنترل کننده
6-3- کنترل کننده برداری مستقیم با جهت یابی شار استاتور
6-4- کنترل برداری غیر مستقیم با جهتیابی شار رتور و اینوتر PWM با جریان کنترل شده
6-5- کنترل برداری با اینورترها PWM و در شرایط کنترل ولتاژ
6-6- کنترل برداری با استفاده از اینورتر CSI
فصل سوم: روشهای الکتریکی و مکانیکی کنترل دبی در پمپها
چکیده
1- مقدمه
2- استخراج رابطه میان گشتاور، سرعت و دبی یک پمپ
3- ارزیابی به کارگیری شیر فلکه به عنوان روش معمول کنترل دبی پمپ
4- ارزیابی روش کنترل دور موتور القایی به منظور کنترل دبی سیال
5- مقایسه نتایج حاصل از روشهای مختلف کنترل دبی سیال
6- ارزیابی اقتصادی به کارگیری ASD
نتایج
فصل چهارم: کاربرد AC درایوها در پمپ های آبیاری و آبرسانی
مقدمه
1- مشخصه های سیستم پمپ و بار و طبقه بندی پمپ ها
2- مشخصه پمپ های روتو دینامیک
3- تاثیر سرعت متغیر پمپ روی منحنی عملکرد آن
4- پرفورمنس مکش پمپ (NPSH)
5- نیازهای عملیاتی پمپ ها
6- راندمان پمپ
7- پمپ های موازی
8- کنترل on/off پمپ های موازی
9-1- کنترل فلو با روش شیر کنترل
9-2- کنترل فلو با روش شیر BYPASS
9-3- کنترل فلو توسط درایوهای دور متغیر
10- آبیاری در مزارع (Irrigation)
11- روشهای مختلف استفاده از درایو برای کنترل پمپ
11-1- روش مالتی مستر Multi Master
11-2- روش Multi Follower
11-3- تشریح عملکرد کنترل در روش Advance level Control
فصل پنجم
مقدمه
1- مصرف انرژی در موتورهای الکتریکی
2- موانع در سیاستگذاری انرژی
3- انتخاب موتور مناسب
3-1- تطابق موتور و بار
3-2- موتورهای با راندمان بالا
4- اقدامات مورد نیاز برای بهبود عملکرد سیستمهای مرتبط با الکتروموتورها
4-1- کیفیت توان Power Quality
4-2- تثبیت ولتاژ شبکه
4-3- عدم تقارن فاز
4-4- ضریب قدرت
5- روشهای عملمی برای افزایش بازدهی موتور
6- دستورالعملهای لازم برای بهبود عملکرد موتورهای الکتریکی
7- دسته بندی اقدامات لازم برای بهینه سازی مصرف انرژی
8- تکنولوژی الکترونیک قدرت و درایوهای AC
9- کنترل کننده دور موتور
10- مزایای استفاده از کنترل کننده های دور موتور
11- مدیریت بهینه سازی مصرف انرژی و نقش کنترل کننده های دور موتور
12- پمپها و فنها
13- قوانین افینیتی در کاربردهای پمپ و فن
14- محاسبات صرفه جویی انرژی در فن
15- یک مطالعه موردی در ایران
16- سیستمهای تهویه مطبوع
17- ماشین تزریق پلاستیک
18- صرفه جویی انرژی در تاسیسات آب و فاضلاب
19- کمپرسورها
20- نیروگاه ها
21- سیمان
22- قابلیتهای کنترل کننده دور موتور مدرن
22-1- نرم افزار کاربردی کنترل پمپ و فن
22-2- نرم افزار کاربردی کنترل سطح پیشرفته
22-3- نرم افزار کنترلی Master Follower
23- درایوهای دور متغیر VACON مصداقی از درایوهای مدرن
24- مسائلی که درایوهای دور متغیر به وجود می آورند
منابع
پرداخت با کلیه کارتهای عضو شتاب امکان پذیر است.پروژه بازوی ربات قابل برنامه ریزی جهت بکارگیری در دستگاه های CNC

پروژه بازوی ربات قابل برنامه ریزی جهت بکارگیری در دستگاه های CNC
فرمت فایل دانلودی: .rarفرمت فایل اصلی: doc
تعداد صفحات: 153
حجم فایل: 3083
قیمت: : 4000 تومان
بخشی از متن:
مقدمه:
امروزه در دنیایی که کامپیوتر در ابعاد مختلف زندگی انسان باری را به دوش می کشد، و ابؤاری برای سرعت ودقت کار ها محسوب می شود، همة ما می دانیم که رباتها یکی از پدیده های حیرت برانگیز خلق شده توسط انسان است و انسانها با در هم آمیختن علوم کامپیوتر ومکانیک وریاضی و... شگفتی های غیر قابل انکاری پدید آوردند.
هم اکنون در سال 2001 میلادی استفاده از رباتها در کشور های صنعتی امری مرسوم شده و بکار گیری آنها در خطوط صنعتی، اکتشافات فضایی، انجام کارهای پر خطر برای انسان، خانه یاری و سرگرمی بوضوح دیده می شود. بطور مثال در کشور ژاپن بیش از سه ونیم میلیون و در کشور ایالات متحده آمریکا بیش ازیک میلیون و هشتصد هزارربات در حال کار وجود دارد .این در حالی است که این معقولة مطالعاتی در کشور های توسعه نیافته یا در حال توسعه هنوز مورد توجه واقع نیست و ِا بطور شایسته به آن پرداخته نشده و عقب ماندگی زیادی در این مورد وموارد مشابه حس می گردد. بطوریکه منابع اطلاعاتی این صنعت در کشور ما بسیار محدود است، و معمولاًَ دنانده شرکت یا سازمانی در این مورد گامی هم برداشته باشد، از انتشار ودر اختیار گذاشتن آن برای استفادة دیگران به شدت خودداری می ورزد بابیم آنکه منافع مالی سازمان مورد تهدید واقع شود.
پایان نامه ای که هم اکنون پیش روی شماست حاصل تلاش اینجانب برای بررسی مقدمات علم رباتیک می باشد .هدف این پژوهش مطالعة موتورهای پله ای (stepping Motor) و درگاه موازی کامپیوتر( Parallel Port) و میکروکنترلرها (AVR) می باشد.
در تهیة این پایان نامه سعی شده تا به موضوعات مورد بررسی بطور جامع و بصورت کاربردی پرداخته شود و از منابع اطلاعاتی معتبر استفاده شود .امید است این مجموعه بتواند در جهت آشنایی و راهنمایی دوستان دیگر که گام های بلند تر دیگری در این زمینه بر خواهند داشت، مفید واقع شود.
فهرست مطالب:
مقدمه
فصل اول: درگاه موازی کامپیوتر
1-1 تاریخچه درگاه موازی
1-2 آشنائی با درگاه موازی
1-3 پینها و ثباتهای پورت پارالل
1-4 شرح پینهای درگاه موازی
1-5 استاندارد Centronics
1-6 آدرسهای پورت موازی
1-7 ثبات های نرم افزار در پورت پارالل استاندارد
1-8 پورتهای دو طرفه (Bi-Directional)
1-9 استفاده از پورت پارالل در ورود 8 بیت
1-10 مود چهار بیتی (Nibble Mode)
1-11 بکارگیری IRQ پورت پارالل
1-12 مودهای پارالل پورت در BIOS
فصل دوم: موتورهای پله ای و مدارات کنترل آنها
2-1 آشنایی با موتور پله ای
2-2 ساختمان داخلی موتور پله ای
2-3 طبقه بندی موتورهای پله ای
الف- موتورهای پله ای نوع آهنربای دائمی
ب- موتورهای پله ای نوع رلوکتانس متغییر
ج- موتورهای هیبرید
2-4 انواع موتورهای پله ای و چگونگی عملکرد آنها
- موتورهای با مقاومت مغناطیسی متغییر
- موتورهای تک قطبی
- موتورهای دو قطبی
- موتورهای چند فاز
2-5 ترتیب فازهای موتور پله ای
2-6 پارامترها و اصطلاحات موتور پله ای
2-7 مدارات کنترل موتور پله ای
- موتورهای رلوکتانس متغییر
- موتورهای مغناطیس دائم تک قطبی و هیبرید
- راه اندازهای تک قطبی و رلوکتانس متغییر کاربردی
- موتورهای دوقطبی و H-bridge
- مدارات راه انداز دوقطبی کاربردی
2-8 نرم افزار کنترل موتور پله ای
2-9 آشنائی با چند موتور پله ای قابل دسترس در بازار
2-9-1 شناسایی بعضی از موتورهای پله ای از روی تعداد و رنگ سیم
2-10 بررسی بعضی از مدارات کنترل و درایور موتورهای پله ای
فصل سوم: سخت افزار و نرم افزار پروژه
3 -1 معرفی میکرو کنترلر AVR
3-2 خصوصیات ATMEGA32
3-3 معرفی مختصر کامپایلر BASCOM
3-4 استفاده از ATMEGA32 به عنوان درایور یک STEPPER MOTOR
3-5 استفاده از میکرو کنترلر ATMEGA32 به عنوان درایور چهار محور ربات
3-6 استفاده از کامپایلر C++ در برنامه نویسی پورت پارالل
3-7 برنامة کنترل ربات نوشته شده تحت کامپایلر C++
ضمیمة الف (پورت پارالل)
ضمیمة ب (موتورهای پله ای)
ضمیمة ج (سخت افزارونرم افزار پروژه)
تحقیق بررسی ساختار و عملکرد موتورهای پلهای
تحقیق بررسی ساختار و عملکرد موتورهای پلهای
فرمت فایل دانلودی: .docفرمت فایل اصلی: doc
تعداد صفحات: 54
حجم فایل: 702
قیمت: : 4000 تومان
بخشی از متن:
بخشی از متن:
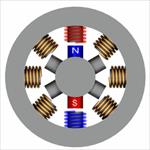
شکل 1-1 مقطع عرضی ساختار یک موتور پلهای مدرن نمونه را نشان می دهد؛ این موتور به نام موتور رلوکتانس متغییر تک پشته ای خوانده می شود. ما ابتدا با استفاده از این شکل نحوه عملکرد این ماشین را مطالعه خواهیم کرد. هسته استاتور دارای شش قطب یا دندانه برجسته می باشد، روتور هم دارای چهار قطب است، هر دو هسته روتور و استاتور از جنس فولاد نرم هستند. سه دسته سیم پیچی همانطور که در شکل نشان داده شده، آرایش داده شده اند. هر دسته دارای دو کلاف است که بصورت سری متصل شده اند. یک دسته از سیم پیچی ها فاز نامیده می شود، و نتیجتاً این ماشین یک موتور سه فاز است. جریان از یک منبع تغذیه DC از طریق کلیدهای I، II، III به سیم پیچی ها تامین می شود. در وضعیت (1)، سیم پیچی فاز I از طریق جریان کلید I تغذیه می شود، یا به اصطلاح فنی فاز I تحریک می شود؛ شار مغناطیسی ناشی از تحریک که در فاصله هوایی واقع می شود با پیکانهایی نشان داده شده است. در وضعیت (1)، دو قطب برجسته استاتور فاز I که تحریک شده اند با دو دندانه از چهار دندانه روتور هم ردیف هستند. این حالت از نظر دینامیکی یک حالت تعادل است. هنگامیکه کلید II برای تحریک فاز II علاوه بر فاز I بسته می شود، شار مغناطیسی در قطبهای استاتور فاز II به حالت نشان داده شده در وضعیت (2) بوجود می آید، و گشتاوری در جهت عکس ساعتگرد بعلت “کشش” در خطوط خمیده میدان مغناطیسی بوجود می آید. از اینرو روتور سرانجام به وضعیت (3) خواهد رسید.
فهرست مطالب:
1-3- موتور پلهای چیست و مشخصه های اساسی آن کدامند؟
2-3- تاریخچه ابتدایی موتورهای پلهای
3-3- فعالیتهای دانشگاهی
4- طرح کلی موتورهای پلهای مدرن
1-4- سیستم های کنترل حلقه- باز
1-1-4- ترکیب سیستم
2-1-4- پله و نمو
2-4- ویژگیهای موتورهای پلهای از نقطه نظر کاربرد
1-2-4- زاویه پله کوچک و چگونگی دستیابی به آن
2-2-4- گشتاور بازیابی و نگهدارنده بالا
3-2-4- خطای تعیین موقعیت جمع ناپذیر
4-2-4- رفتار دینامیک بسیار خوب ناشی از نسبتهای گشتاور به اینرسی بالا
3-4- طبقه بندی موتورهای پلهای
4-4- روش های تحریک
1-4-4- تحریک تکفاز
2-4-4- عملکرد تحریک دو فاز
3-4-4- روش نیم پله
5- سیستم درایو و مدار کنترل حلقه- باز موتورهای پلهای
1-5- سیستم درایو
1-2-5- توالی ساز یوینورسال MSI
6- کاربرد موتورهای پلهای
1-6- لوازم جانبی کامپیوتر
1-1-6- چاپگرها
2-1-6- رسامهای گراف
3-1-6- تمایلات جدید به موتورهای پلهای خطی/ سطحی
4-1-6- درایوهای دیسک سخت/ فلاپی
7- ساخت موتورهای پلهای
1-7- اساس طراحی و ساخت
1-1-7- فلسفه طراحی کارخانه
2-1-7- تولید انبوه و تولید گروهی
2-7- طراحی
1-2-7- تعیین مشخصات نهایی
3-2-7- اهمیت دقت تعیین موقعیت
صفحه کلید
تحقیق بررسی ساختار و عملکرد موتورهای پلهای
تحقیق بررسی ساختار و عملکرد موتورهای پلهای
فرمت فایل دانلودی: .docفرمت فایل اصلی: doc
تعداد صفحات: 54
حجم فایل: 702
قیمت: : 4000 تومان
بخشی از متن:
بخشی از متن:
شکل 1-1 مقطع عرضی ساختار یک موتور پلهای مدرن نمونه را نشان می دهد؛ این موتور به نام موتور رلوکتانس متغییر تک پشته ای خوانده می شود. ما ابتدا با استفاده از این شکل نحوه عملکرد این ماشین را مطالعه خواهیم کرد. هسته استاتور دارای شش قطب یا دندانه برجسته می باشد، روتور هم دارای چهار قطب است، هر دو هسته روتور و استاتور از جنس فولاد نرم هستند. سه دسته سیم پیچی همانطور که در شکل نشان داده شده، آرایش داده شده اند. هر دسته دارای دو کلاف است که بصورت سری متصل شده اند. یک دسته از سیم پیچی ها فاز نامیده می شود، و نتیجتاً این ماشین یک موتور سه فاز است. جریان از یک منبع تغذیه DC از طریق کلیدهای I، II، III به سیم پیچی ها تامین می شود. در وضعیت (1)، سیم پیچی فاز I از طریق جریان کلید I تغذیه می شود، یا به اصطلاح فنی فاز I تحریک می شود؛ شار مغناطیسی ناشی از تحریک که در فاصله هوایی واقع می شود با پیکانهایی نشان داده شده است. در وضعیت (1)، دو قطب برجسته استاتور فاز I که تحریک شده اند با دو دندانه از چهار دندانه روتور هم ردیف هستند. این حالت از نظر دینامیکی یک حالت تعادل است. هنگامیکه کلید II برای تحریک فاز II علاوه بر فاز I بسته می شود، شار مغناطیسی در قطبهای استاتور فاز II به حالت نشان داده شده در وضعیت (2) بوجود می آید، و گشتاوری در جهت عکس ساعتگرد بعلت “کشش” در خطوط خمیده میدان مغناطیسی بوجود می آید. از اینرو روتور سرانجام به وضعیت (3) خواهد رسید.
فهرست مطالب:
1-3- موتور پلهای چیست و مشخصه های اساسی آن کدامند؟
2-3- تاریخچه ابتدایی موتورهای پلهای
3-3- فعالیتهای دانشگاهی
4- طرح کلی موتورهای پلهای مدرن
1-4- سیستم های کنترل حلقه- باز
1-1-4- ترکیب سیستم
2-1-4- پله و نمو
2-4- ویژگیهای موتورهای پلهای از نقطه نظر کاربرد
1-2-4- زاویه پله کوچک و چگونگی دستیابی به آن
2-2-4- گشتاور بازیابی و نگهدارنده بالا
3-2-4- خطای تعیین موقعیت جمع ناپذیر
4-2-4- رفتار دینامیک بسیار خوب ناشی از نسبتهای گشتاور به اینرسی بالا
3-4- طبقه بندی موتورهای پلهای
4-4- روش های تحریک
1-4-4- تحریک تکفاز
2-4-4- عملکرد تحریک دو فاز
3-4-4- روش نیم پله
5- سیستم درایو و مدار کنترل حلقه- باز موتورهای پلهای
1-5- سیستم درایو
1-2-5- توالی ساز یوینورسال MSI
6- کاربرد موتورهای پلهای
1-6- لوازم جانبی کامپیوتر
1-1-6- چاپگرها
2-1-6- رسامهای گراف
3-1-6- تمایلات جدید به موتورهای پلهای خطی/ سطحی
4-1-6- درایوهای دیسک سخت/ فلاپی
7- ساخت موتورهای پلهای
1-7- اساس طراحی و ساخت
1-1-7- فلسفه طراحی کارخانه
2-1-7- تولید انبوه و تولید گروهی
2-7- طراحی
1-2-7- تعیین مشخصات نهایی
3-2-7- اهمیت دقت تعیین موقعیت
صفحه کلید
گزارش کارآموزی شرکت توزیع برق بخش بادرود
گزارش کارآموزی شرکت توزیع برق بخش بادرود
فرمت فایل دانلودی: .docفرمت فایل اصلی: doc
تعداد صفحات: 55
حجم فایل: 144
قیمت: : 5000 تومان
بخشی از متن:
بخشی از متن:
شرکت توزیع برق استان اصفهان به عنوان پیمانکار در شهرستانهای خود مشغول تعمیرات و نگهداری شبکه های توزیع از قبیل شبکه فشار متوسط، شبکه فشار ضعیف و همچنین پست های زمینی و کیوسک پست های هوایی برای روشنایی و انتقال موجود می باشد.
برق شهرستان نطنز یکی از شهرستان های هجده گانه اداره توزیع برق استان اصفهان می باشد که قسمت اعظم آن را بخش بادرود در بر می گیرد ، در شهرستان نطنز 18 هزار مشترک عادی و همچنین 300 مشترک دیماندی که از پمپ های آب و مخازن استفاده می کنند ، وجود دارد که از برق این بخش استفاده می کنند . در این شهرستان عملیات تعمیرات و نگه داری 566 کیلومتر شبکه فشار متوسط و 662 کیلومتر شبکه فشار ضعیف و کلید پست های زمینی و هوایی عادی و دیماندی را تعداد 14 نفر نیروی انسانی فنی، تخصصی انجام می دهند که نیمی از این نیروی انسانی در بخش بادرود مشغول انجام وظیفه هستند.
فهرست مطالب:
مقدمه ای بر مکان کارآموزی
مقدمه
وظایف وزارت نیرو
پست های فشار قوی
مزایای پست های GIS
اجزای تشکیل دهنده پست
دستورالعمل کار در هنگام سیم کشی هوایی
دستورالعمل تعویض یا جابجایی تیر
عواملی که باعث قطع ناخواسته فیدرهای 20 کیلو ولت می شود
عواملی که باعث معیوب شدن کابل 20 کیلو ولت می شود
اصول بهره برداری از پست های هوایی
اصول بهره برداری از پست های زمینی
مواردی که باعث معیوب شدن ترانسفورماتورهای توزیع می گردند
دستورالعمل نگهداری و سرویس ترانسفورماتورهای توزیع
شرایط نصب ترانسفورماتور
سرویس و نگه داری ترانسفورماتورهای توزیع
تامین کسری روغن
هواگیری و آچار کشی ترانسفورماتور
تست و استقامت الکتریکی روغن
دستگاه رطوبت گیر
کلید تنظیم ولتاژ
شرایط پارالل نمودن دو دستگاه ترانسفورماتور
دستورالعمل کارکردن روی تابلو های توزیع
مراقبت و نگهداری از ترانس های قدرت
خشک کردن ترانسفورماتورها
دژنکتورها
تست های دوره ای تجهیزات کلیدخانه های فشارقوی
چک کردن رله بوخهلتز
زمین حفاظتی در تجهیزات الکتریکی
پروژه تعیین چگالی بارهای سطحی میان گاه

پروژه تعیین چگالی بارهای سطحی میان گاه
فرمت فایل دانلودی: .rarفرمت فایل اصلی: doc
تعداد صفحات: 150
حجم فایل: 7122
قیمت: : 6000 تومان
بخشی از متن:
چکیده:
در ساختارهای Si/SiGe/Si که بوسیله روش رونشانی پرتو مولکولی رشد می یابند به دلیل ناپیوستگی نوار ظرفیت یک چاه کوانتومی در نوار ظرفیت و در لایه SiGe شکل می گیرد اگر لایه های مجاور با ناخالصی های نوع p آلاییده شده باشند حفره های لایه آلاییده به داخل چاه کوانتومی می روند و تشکیل گاز حفره ای دوبعدی در میانگاه نزدیک لایه آلاییده می دهند اینگونه ساختارها را ساختار دورآلاییده می نامند .به دلیل جدایی فضایی بین حاملهای آزاد دوبعدی و ناخالصی های یونیده در ساختارهای دورآلاییده برهمکنش کولنی کاهش یافته و درنتیجه پراکندگی ناشی از ناخالصی های یونیده کاهش و به تبع آن تحرک پذیری حاملهای آزاد دوبعدی افزایش می یابد .چگالی سطحی گاز حفره ای دوبعدی به پارامترهای ساختار مثلاً ضخامت لایه جداگر، چگالی سطحی بارهای لایه پوششی، ضخامت لایه پوششی، و غیره وابسته است. علاوه بر این در ساختارهای دورآلاییده دریچه دار با تغییر ولتاِژ دریچه چگالی سطحی گاز حفره ای قابل کنترل می-باشد . این ساختارها در ساخت ترانزیستورهای اثر میدانی مورد استفاده قرار می گیرند.
در این پایان نامه ابتدا به تشریح ساختار دورآلاییده Si/SiGe/Si می پردازیم و سپس مدلی نظری که بتواند ویژگیهای الکتریکی گاز حفره ای دوبعدی درون چاه کوانتومی ساختار p-Si/SiGe/Si و همچنین میزان انتقال بار آزاد به درون چاه و بستگی آن به پارامترهای ساختار را توجیه کند ارائه می دهیم. در ساختار دورآلاییده معکوس p-Si/SiGe/Si دریچه دار با دریچه Al/Ti/Si از این مدل نظری استفاده می کنیم و با برازش نتایج تجربی تغییرات چگالی سطحی گاز حفره ای بر حسب ولتاژ دریچه توانسته ایم چگالی سطحی بارهای میانگاه Ti/Si در این ساختارها را در محدوده (m-2) 1015 × 78/1 تا (m-2) 1015 × 63/4 ارزیابی کنیم.
فهرست مطالب:
چکیده
فصل اول: ساختارهای دورآلاییده
مقدمه
1-1 نیمه رسانا
1-2 نیمه رسانا با گذار مستقیم و غیر مستقیم
1-3 جرم موثر
1-4 نیمه رسانای ذاتی
1-5 نیمه رسانای غیر ذاتی و آلایش
1-6 نیمه رساناهای Si و Ge
1-7 رشد بلور
1-7-1 رشد حجمی بلور
1-7-2 رشد رونشستی مواد
1-7-3 رونشستی فاز مایع
1-7-4 رونشستی فاز بخار
1-7-5 رونشستی پرتو مولکولی
1-8 ساختارهای ناهمگون
1-9 توزیع حالتهای انرژی الکترونها در چاه کوانتومی
1-10 انواع آلایش
1-10-1 آلایش کپه ای
1-10-2 آلایش مدوله شده (دورآلاییدگی)
1-10-3 گاز الکترونی دوبعدی
1-10-4 گاز حفره¬ای دوبعدی
1- 11 ویژگی و انواع ساختارهای دور آلاییده
1-11-1 انواع ساختارهای دورآلاییده به لحاظ ترتیب رشد لایه ها
1-11-2 انواع ساختار دور آلاییده به لحاظ نوع آلاییدگی (n یا p)
1-11-3 انواع ساختار دور آلاییده دریچه دار
1-12 کاربرد ساختارهای دور آلاییده
1-12-1 JFET
1-12-2 MESFET
1-12-3 MESFET پیوندگاه ناهمگون
فصل دوم: اتصال فلز نیمه رسانا (سد شاتکی)
مقدمه
2-1 شرط ایده آل و حالتهای سطحی
2-2 لایه تهی
2-3 اثر شاتکی
2-4 مشخصه ارتفاع سد
2-4-1 تعریف عمومی و کلی از ارتفاع سد
2-4-2 اندازه گیری ارتفاع سد
2-4-3 اندازه گیری جریان- ولتاژ
2-4-4 اندازه گیری انرژی فعال سازی
2-4-5 اندازه گیری ولتاژ- ظرفیت
2-4-6 تنظیم ارتفاع سد
2-4-7 کاهش سد
2-4-8 افزایش سد
2-5 اتصالات یکسوساز
2-6 سدهای شاتکی نمونه
فصل سوم: انتقال بار در ساختارهای دورآلاییده
مقدمه
3-1 ساختار دور آلاییده معکوس p-Si/Si1-XGeX/Si
3-2 ساختار نوار ظرفیت ساختار دور آلاییده معکوس p-Si/SiGe/Si
3-3 محاسبه انتقال بار در ساختارهای دور آلاییده
3-3-1 آلایش مدوله شده ایده¬آل
3-3-2 محاسبات خود سازگار چگالی سطحی حاملها
3-3-3 اثر بارهای سطحی بر چگالی گاز حفره ای
3-4 روشهای کنترل چگالی سطحی حاملها
3-4-1 تاثیر تابش نور بر چگالی سطحی حاملها
3-4-2 تاثیر ضخامت لایه پوششی بر چگالی سطحی حاملها
3-4-3 دریچه دار کردن ساختار دور آلاییده
3-5 ساختارهای دورآلاییده معکوس p-Si/SiGe/Si با دریچه بالا
3-6 انتقال بار در ساختارهای دورآلاییده معکوس با دریچه بالا
3-7 تاثیر بایاسهای مختلف بر روی چگالی سطحی حفره ها
3-8 ملاحظات تابع موج
3-9 وابستگی Zav به چگالی سطحی حاملها در ساختارهای بی دریچه
3-10 وابستگی Zav به چگالی سطحی حاملها در ساختارهای دریچه دار
فصل چهارم: نتایج محاسبات
مقدمه
4-1 محاسبات نظری ساختارهای دورآلاییده بی دریچه Si/SiGe/Si
4-1-1 محاسبات نظری ns برحسب Ls
4-1-2 محاسبات نظری ns برحسب NA
4-1-3 محاسبات نظری ns برحسب nc
4-1-4 محاسبات نظری کلیه انرژیهای دخیل برحسب Ls
4-2 محاسبات نظری ساختارهای دورآلاییده دریچه دار Si/SiGe/Si
4-2-1 محاسبات نظری ns برحسب vg
4-2-2 بررسی نمونه ها با nsur متغیر و تابعی خطی از vg با شیب مثبت
4-2-3 بررسی نمونه ها با nsur متغیر و تابعی خطی از vg با شیب منفی
فصل پنجم: نتایج
5-1 مقایسه سد شاتکی با ساختار دورآلاییده دریچه دار p-Si/SiGe/Si
5-2 بررسی نمودارهای مربوط به چهار نمونه
پیوست
چکیده انگلیسی (Abstract)
منابع
تحقیق پردازنده دیجیتالی سیگنال (رایگان)

تحقیق پردازنده دیجیتالی سیگنال
فرمت فایل دانلودی: .docفرمت فایل اصلی: doc
تعداد صفحات: 28
حجم فایل: 63
قیمت: : رایگان
بخشی از متن:
بخشی از متن:
برنامه های کاربردی که از تراشه پردازمن دیجیتالی سیگنال استفاده می کند، در حال ترقی اند، که دارای مزیت کارآئی بالا و قیمت پایین است، رای یک هزینه تخمین شش میلیارد دلاری در سال 2000 بازار بحد فوق العاده گسترش یافته و فروشنده هم زیاد شد.
زمانیکه شرکتهای تاسیس شده با ایجاد معماریهای جدید، کارآمد، اجرای عالی بر سر سهم بازار رقابت می کردند، تعداد زیادی افراد تازه وارد به بازار وارد شده بودند حوزه معماری پردازش دیجیتالی سیگنال (DSP) بی سابقه است. علاوه بر رقابت گسترده درمیان فروشنده های پردازندة DSP تهدید جدیدی از سوی پردازنده های همه کاره با تشدید کننده DSP بوجود آمد. بنابراین فروشنده های DSP برای خارج کردن رقیبان از رده، معماری هایشان را به تأیید رساندند چیزی که پیشرفتهای اخر را در معماری پردازندة DSP را دنبال میکند شامل افزایش تغییر در روشهای معماری در این DSP، و پردازنده های همه کاره می شود.
فهرست مطالب:
مقدمه
اجرا از طریق برابر شدن
چه تعداد دستور العمل در هر دوره زمانی وجود دارد؟
یک ساختار چند وسعتی دارد؟
نقطه نظر برنامه ریز
پیش بینی زمان اجرا
پیشرفت بر راه کار
روش دیگر برای همانند سازی
انتقال فایل کردن به DSP
خط پایانی: اجرا
آیندة DSP
پردازنده های همه کاره